信号与系统期末Review
Signal and System 期末Review
Chapter 5 The Discrete-Time Fourier Transform
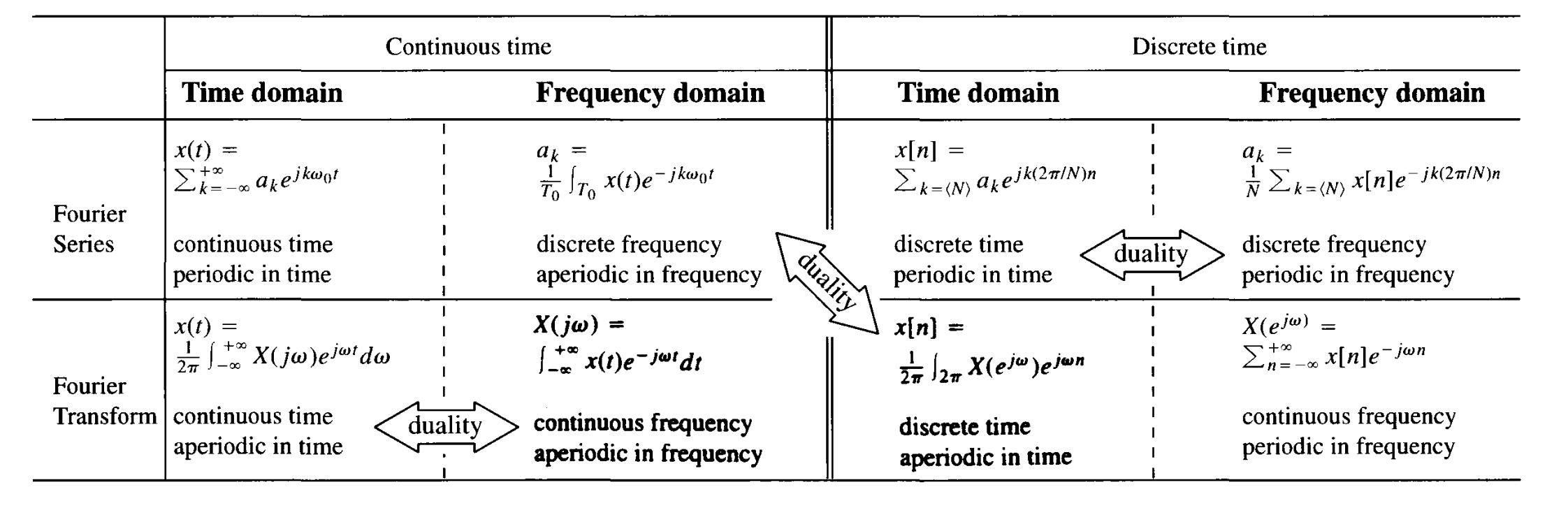
Fourier Transform for Aperiodic Signals
- Discrete Fourier Transform: $x[n] = \displaystyle \sum_{k=-\infty}^{\infty} x[n]e^{-j\omega n}$
- Inverse Fourier Transform: $x[n] = \displaystyle \frac{1}{2\pi}\int_{2\pi}X(\omega)e^{j\omega n}d\omega$
- $X(e^{j\omega})(d\omega)/2\pi$ is the weight of different frequency
Note: $X(e^{j\omega})$ is a periodic function with period $2\pi$
Comparied with continuous FT: $e^{-j(\omega +2\pi)t }\neq e^{-j\omega}$ because t is not a integer.
- Some DFT pairs
- $x[n] = \delta[n] \leftrightarrow X(e^{j\omega}) = 1$
- $x[n]=u[n] \leftrightarrow X(e^{j\omega}) = \frac{1}{1-e^{-j\omega}}+\pi \sum_{k=-\infty}^{\infty}\delta(\omega - 2\pi k)$
- $x[n] = \alpha ^nu[n], |\alpha|<1 \leftrightarrow X(e^{j\omega}) =\frac{1}{1-\alpha e^{-j\omega}}$
- $x[n] = \alpha^{|n|}, |\alpha|<1 \leftrightarrow X(e^{j\omega}) = \frac{1-\alpha^2}{1-2\alpha cos\omega + \alpha^2}$
- $x[n]=\begin{cases}
1, |n|\le N_1 \
0, n>N_1
\end{cases}\leftrightarrow X(e^{j\omega}) = \displaystyle \frac{sin[\omega (N_1+\frac{1}{2})]}{sin(\frac{\omega}{2})}$ - $\displaystyle x[n]=\frac{\sin \omega _0n}{\pi n}\leftrightarrow X(e^{j\omega}) = \begin{cases}
1, |\omega|<\omega _0 \
0, |\omega|>\omega _0\end{cases}$
- Convergence of DFT:
- Absolutely summable: $\displaystyle \sum_{n=-\infty}^{\infty}|x[n]|<\infty$
- Finite energy condition: $\displaystyle \sum_{n=-\infty}^{\infty}|x[n]|^2<\infty$
Fourier Transform for Periodic Signals
- $x[n] = \sum_{k=
}a_ke^{jk(\frac{2\pi}{N})n}$ - $X(e^{j\omega}) = \displaystyle \sum_{k=-\infty}^{\infty}2\pi a_k\delta(\omega - k\frac{2\pi}{N})$
Properties of the Discrete-Time Fourier Transform
- Periodicity : $X(e^{j(\omega +2\pi)}) = X(e^{j\omega})$
- Linearity : $a_1x_1[n]+a_2x_2[n] \leftrightarrow a_1X_1(e^{j\omega})+a_2X_2(e^{j\omega})$
- Time Shifting : $x[n-n_0] \leftrightarrow e^{-j\omega n_0}X(e^{j\omega})$
- e.g. $X(e^{j\omega})=e^{j\omega}\leftrightarrow x[n] = \delta[n-1]$
- Frequency Shifting : $e^{j\omega_0n}x[n] \leftrightarrow X(e^{j(\omega-\omega_0)})$
- Conjugation : $x^*[n] \leftrightarrow X^*(e^{-j\omega})$
- If $x[n]$ is real, $X(e^{j\omega}) = X^*(e^{-j\omega})$
- Magnitude of $X(e^{j\omega})$ is even, phase of $X(e^{j\omega})$ is odd
- If $x[n]$ is real, $X(e^{j\omega}) = X^*(e^{-j\omega})$
- Time Reversal : $x[-n] \leftrightarrow X(e^{-j\omega})$
- x[n] even, $X(e^{j\omega})$ is even
- x[n] odd, $X(e^{j\omega})$ is odd
- x[n] read and even, $X(e^{j\omega})$ is real and even
- x[n] read and odd, $X(e^{j\omega})$ is imaginary and odd
- Difference : $x[n]-x[n-1] \leftrightarrow (1-e^{-j\omega})X(e^{j\omega})$
- Accumulation: $\displaystyle \sum_{k=-\infty}^{n}x[k] \leftrightarrow \frac{1}{1-e^{-j\omega}}X(e^{j\omega})+\pi X(e^{j0})\sum_{k=-\infty}^{\infty}\delta(\omega - 2\pi k)$
- Time expansion : $x_{(k)}[n]\leftrightarrow X(e^{j\omega k})$
- $x_{(k)}[n] = \begin{cases}
x[\frac{n}{k}], n = 0, \pm k, \pm 2k, \cdots \
0, otherwise \end{cases}$
- $x_{(k)}[n] = \begin{cases}
- Difference in frequency : $nx[n] \leftrightarrow j\frac{d}{d\omega}X(e^{j\omega})$
- Parseval’s Theorem : $\displaystyle \sum_{n=-\infty}^{\infty}|x[n]|^2 = \frac{1}{2\pi}\int_{2\pi}|X(e^{j\omega})|^2d\omega$
- Convolution : $x[n]*h[n] \leftrightarrow X(e^{j\omega})H(e^{j\omega})$
- Multiplication : $x[n]h[n] \leftrightarrow \frac{1}{2\pi}\int_{2\pi}X_1(e^{j\theta})X_2(e^{j(\omega - \theta)})d\theta$ (Periodic convolution)
- Duality :
Chapter 6: Time and Frequency Characterization of Signal and Systems
这一章不知道在讲什么,好像考试也不是重点,随便整理一点
- Magnitude and Phase of the Fourier Transform
- Discrete FT:
- $X(e^{j\omega}) = \displaystyle \left\vert X(e^{j\omega}) \right\vert e^{j\theta(\omega)}$
- Continuous FT:
- $X(j\omega) = \displaystyle \left\vert X(j\omega) \right\vert e^{j\theta(\omega)}$
- $|X| = \displaystyle \sqrt{Re[X]^2+Im[X]^2}$
- $\theta(\omega) = \displaystyle tan^{-1}\frac{Im[X(j\omega)]}{Re[X(j\omega)]}$
- Discrete FT:
- For LTI system: $H(j\omega) = \displaystyle \left\vert H(j\omega) \right\vert e^{j\theta(\omega)}$
- $\left\vert H(j\omega) \right\vert $: Gain of the system
- $\theta(\omega)$: Phase shift of the system
- Linear phase system: $\theta(\omega) = -\omega t_0$
- Linear phase system means a time shift of the input signal
- Nonlinear phase system: $\theta(\omega) = \theta_0(\omega) - \omega t_0$
- Nonlinear phase system means different frequency of the input signal has different phase change
- Linear phase system: $\theta(\omega) = -\omega t_0$
- Group Delay: $\tau_g(\omega) = -\frac{d\theta(\omega)}{d\omega}$
- Bold’s Plot: Plots of $20\log_{10}\left\vert H(j\omega) \right\vert$ vs $\omega$ or $20\log_{10}\left\vert H(e^{j\omega}) \right\vert$ vs $\log_{10}\omega$
- Step response of Ideal low-pass filters
- $s(0) = \frac{1}{2}$,$s(\infty)=1$
Chapter 9: The Laplace Transform
1.Definition
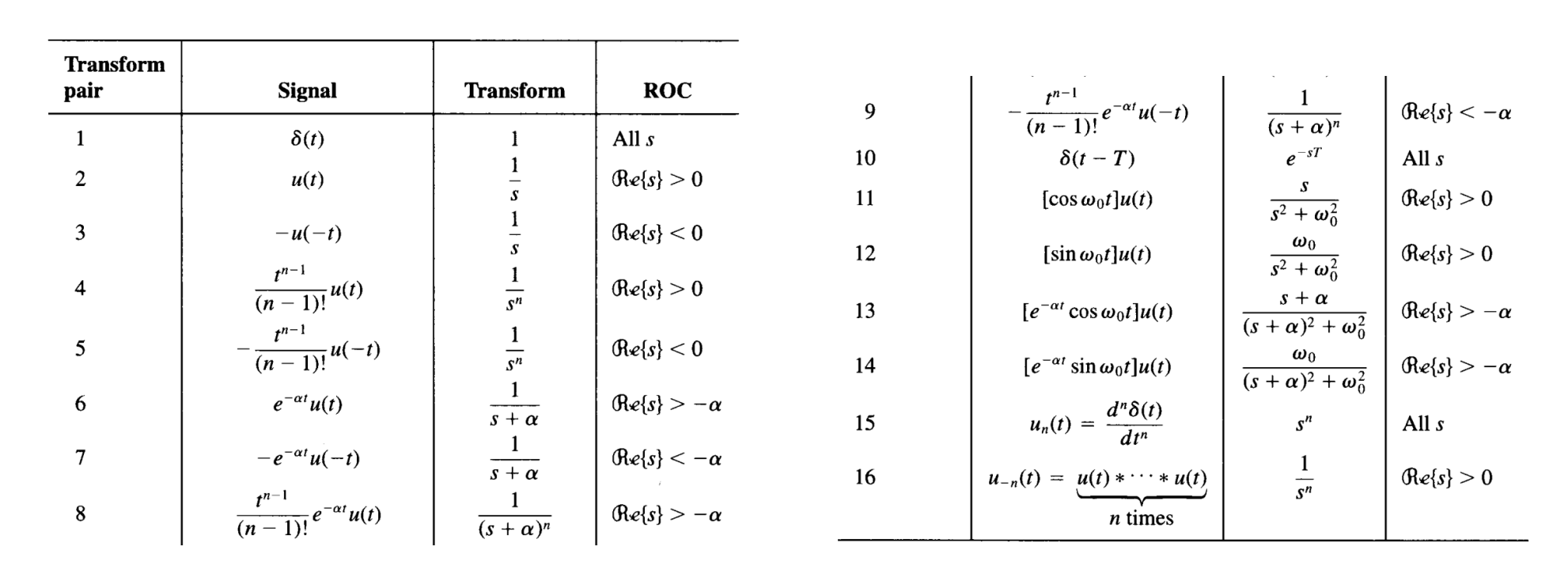
- Laplace Transform: $X(s) = \displaystyle \int_{-\infty}^{\infty}x(t)e^{-st}dt$
- Laplace Transform pairs:
- ROC’s Properties:
- The ROC of $X(s)$ is a strip in the $s$-plane that contains the $j\omega$-axis
- If $x(t)$ is of finite duration and is absolutely integrable, then the ROC is the entire $s$-plane.
- If $x(t)$ is right-sided, and if the line $Re{s}=\sigma _0$ is in the ROC, then all values of $s$ for which $Re[s]>\sigma _0$ are also in the ROC.
- If $x(t)$ is left-sided, and if the line $Re{s}=\sigma _0$ is in the ROC, then all values of $s$ for which $Re[s]<\sigma _0$ are also in the ROC.
2.Properties
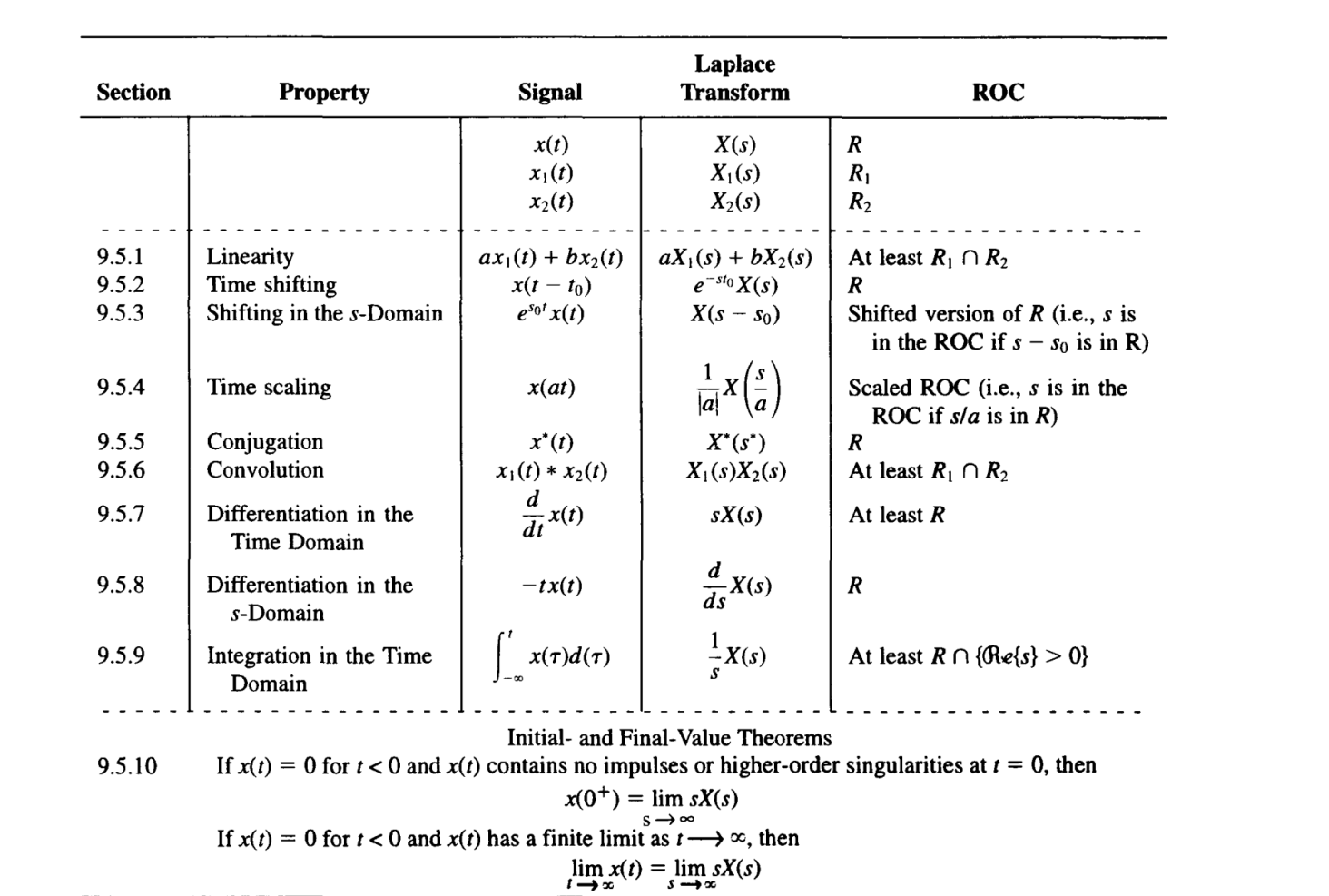
Initial Value Theorem: If $x(t)=0$ for $t<0$,then $x(0^+) = \displaystyle \lim_{s\rightarrow \infty}sX(s)$
Final Value Theorem: If $x(t)=0$ for $t<0$, $x(t)$ has a finite limit as $t\to \infty$, then $x(\infty) = \displaystyle \lim_{s\rightarrow 0}sX(s)$
3. LTI systems analysis using the Laplace Transform
- Causal: ROC of $H(s)$ is the right half of the $s$-plane
- A system with rational $H(s)$ is causal $\Rightarrow$ ROC of $H(s)$ is the right half of the $s$-plane
- Stability: ROC of $H(s)$ includes the $j\omega$-axis
- For a causal system: All the poles of $H(s)$ lie in the left half of the $s$-plane
- All the poles have negative real parts
4. The unilateral Laplace Transform
- Differentiation in the time domain:
- $\frac{d}{dt}x(t) \Leftrightarrow sX(s)-x(0^-)$
- $\frac{d^2x(t)}{dt^2} \Leftrightarrow s^2X(s)-sx(0^-)-x’(0^-)$
Chapter 10: Z-Transform
1.Definition
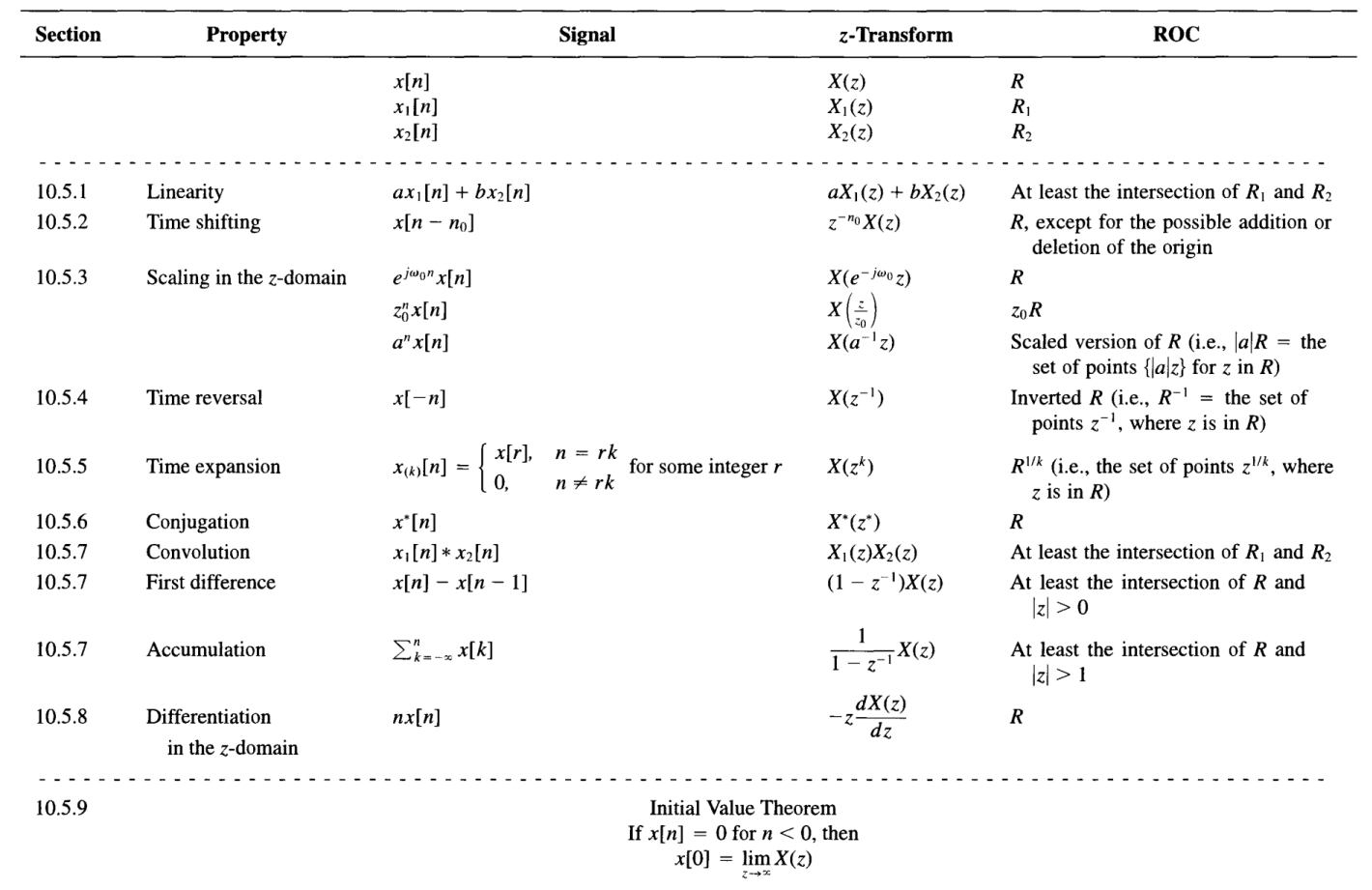
- Z-Transform: $X(z) = \displaystyle \sum_{n=-\infty}^{\infty}x[n]z^{-n}$
- Z-Transform pairs:
- ROC’s Properties:
- The ROC of $X(z)$ is a ring in the $z$-plane that contains the unit circle
- The ROC of $X(z)$ doesn’t contain any poles of $X(z)$
- If $x[n]$ is of finite duration,then the ROC is the entire z-plane except possibly $z=0$ and $z=\infty$

2.Properties
3. LTI systems analysis using the Z-Transform
- Shifting Properties
- $x[n-1] \leftrightarrow z^{-1}X(z)+x[-1]$
- $x[n+1] \leftrightarrow zX(z)zx[0]$
- $x[n-2] \leftrightarrow z^{-2}X(z)+z^{-1}x[-1]+x[-2]$
信号与系统期末Review
http://example.com/2024/01/16/信号与系统期末Review/